![]()
- ロボット制御プログラミングについて学ぼう -
 プログラミング環境の構築
プログラミング環境の構築
今回、ロボットの制御プログラミングはC言語で行うことにします。以下のサイトからBorland C++コンパイラを入手します。(C Magazineなど雑誌付録のCD-ROMから得ることも可能です)
Borland C++ Compiler 5.5:
http://www.borland.co.jp/cppbuilder/freecompiler/
入手した freecommandlinetools2.exe を実行すると、インストーラが起動して c:\borland\bcc55\ フォルダにインストールされます。次に以下の手順でパスの設定と環境設定ファイルの作成を行って下さい。(環境を自動設定する setbcc というツールがベクターなどにあります)
①パスの設定
PATH=%PATH%;c:\borland\bcc55\bin
②環境設定ファイルの作成
bcc32.cfg
----------------------------------
-IC:\borland\bcc55\include
-LC:\borland\bcc55\lib
----------------------------------
ilink32.cfg
----------------------------------
-LC:\borland\bcc55\lib
----------------------------------
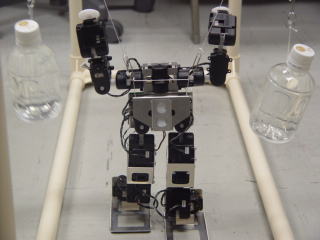
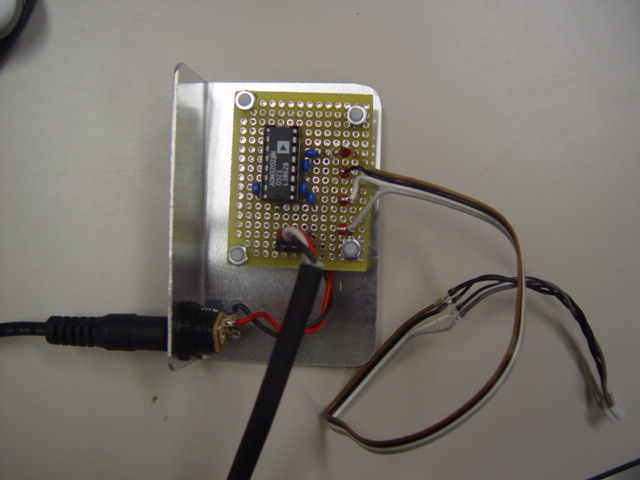
AIモータと通信インタフェース
今回は、ベストテクノロジ社(http://www.besttechnology.co.jp/)のAIモータを利用します。1個\6000と高価な代物ですが、入門用としては最適でしょう。このモータはパソコンとシリアル接続し、制御データを受け取ります。通信インターフェース回路は、上記サイトで購入できます。また、部品を集めれば\400~で自作するこも可能です。

Last Up Date:04/07/21